
Función Electrónica
Mouse
Al desplazarlo sobre una superficie plana, la bola
o sensor mueve los rodillos que están en contacto con ella. Un rodillo se
encarga de los movimientos laterales y otro de los verticales. Los rodillos
están conectados a unas ruedas, llamadas codificadores, que están situadas
enfrente de unos pequeños emisores de luz.
Tienen una gran esfera de plástico o goma, de varias
capas, en su parte inferior para mover dos ruedas que generan pulsos en
respuesta al movimiento de éste sobre la superficie.
Una variante es el modelo
de Honeywell que utiliza dos ruedas inclinadas 90 grados entre ellas en vez de
una esfera.
La circuitería interna cuenta los pulsos generados
por la rueda y envía la información a la computadora, que mediante software
procesa e interpreta.

Estas ruedas poseen unas ranuras que
permiten el paso de la luz hasta unos dispositivos fotosensibles, que detectan
los destellos y los traducen en información codificada que el ordenador es
capaz de interpretar. Por otra parte, al pulsar algún botón del ratón, se
genera otro tipo de señal, que el ordenador distinguirá de la anterior y que
dependiendo del programa que se esté utilizando, permitirá realizar distintas
operaciones.

Teclado
Este consta de una matriz de contactos, que al presionar una
tecla, cierran el circuito. Un micro controlador detecta la presión
de la tecla, y genera un código. Al soltarse la tecla, se genera otro código.
De esta manera el chip localizado en la placa del teclado puede saber cuándo
fue presionada y cuándo fue soltada, y actuar en consecuencia. Los códigos
generados son llamados Códigos de barrido (Scan code, en inglés).
Una vez detectada la presión
de la tecla, los códigos de barrido son generados, y enviados de forma serial a
través del cable y con el conector del teclado, llegan a la placa madre de la
PC. Allí, el código es recibido por el microcontrolador conocido como BIOS DE
TECLADO. Este chip compara el código de barrido con el correspondiente a la
Tabla de caracteres. Genera una interrupción por hardware, y envía los datos al
procesador.

En los teclados AT los
códigos generados son diferentes, por lo que por razones de compatibilidad es
necesario traducirlos. De esta función se encarga el controlador de teclado que
es otro microcontrolador (normalmente el 8042), éste ya situado en el PC. Este controlador
recibe el Código de Búsqueda del Teclado (Kscan Code) y genera el propiamente dicho Código de
Búsqueda. La comunicación del teclado es vía serie. El protocolo de
comunicación es bidireccional, por lo que el servidor puede enviarle comandos
al teclado para configurarlo, reiniciarlo, diagnósticos, etc.

Microfono
El micrófono es un transductor electroacústico. Su
función es la de traducir las vibraciones debidas a la presión acústica
ejercida sobre su cápsula por las ondas sonoras en energía eléctrica, lo que
permite por ejemplo grabar sonidos de cualquier lugar o elemento.
Es capaz de captar ondas sonoras convirtiendo la
potencia acústica en eléctrica de similares características ondulatorias. Para
ello se necesita la combinación escalonada de dos tipos de transductores.

Cámara de vídeo
Podemos explicar su funcionamiento por pasos.
Primero, la luz que proviene de la óptica es descompuesta al pasar por un
prisma de espejos dicróicos que descomponen la luz en las tres componentes
básicas que se utilizan en televisión: el rojo (R o red), el verde (G o green)
y el azul (B o blue).
Justo en la otra cara de cada lado del prisma están los
captadores, actualmente dispositivos CCDs y anteriormente tubos de cámara. El
sistema óptico está ajustado para que en el target de cada captador se
reconstruya la imagen nítidamente.
Esta imagen es leída por los CCDs y su sistema de muestreo y conducida a los circuitos preamplificadores.
Los circuitos de muestreo y lectura de los CCD deben
estar sincronizados con la señal de referencia de la estación.

Ésta imagen leída por los CCD y su sistema de muestreo es conducida luego a los circuitos preamplificadores. En los preamplificadores se genera e inserta, cuando así se quiere, la señal de prueba llamada pulso de calibración, comúnmente llamada cal, la cual recorrerá toda la electrónica de la cámara y servirá para realizar un rápido diagnóstico y ajuste de la misma.
De los preamplificadores las señales se enrrutan a los
procesadores, donde se realizaran las correcciones de gamma, detalle, masking,
pedestal, flare, ganancias, clipeos y limitadores.
Las señales ya están listas para salir al sistema de
producción o para ser grabadas. Se envían entonces a los circuitos de
visionado, los cuales muestran la imagen en el visor de la cámara y la
transmiten mediante los correspondientes conectores de salida.

Estas
señales son mandadas mediante el adaptador triax, fibra óptica o multicore
(26pins) a la estación base, que se encargará de enrutarlas en el sistema de
producción al que pertenece la cámara. Si la cámara está unida a un
magnetoscopio es un camcorder o camascopio y, entonces, las señales se
suministrán a los circuitos indicados para su grabación en cinta, en disco
óptico, disco duro o tarjetas de memoria.
Todas las funciones de la cámara están controladas
con un procesador, el cual se comunica con los paneles de control, tanto de
ingeniería (MSP) como de explotación (OCP), y es el encargado de realizar los
ajustes automáticos y/o manuales pertinentes.
Los sistemas auxiliares de comunicación intercom y
los sistemas de control de la óptica y de luz de aviso Tally residen en
circuitos electrónicos de la placa auxiliar. Todo ello es alimentado por la
fuente de alimentación que se encarga de generar las diferentes tensiones de
alimentación necesarias para los equipos electrónicos y ópticos. Estas
tensiones suelen partir de una única tensión de alimentación 12 Volt CC
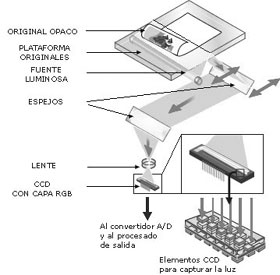
Escaner Plano
Un escáner de computadora se utiliza para convertir,
mediante el uso de la luz, imágenes impresas o documentos a formato digital.
Los escáneres pueden tener accesorios como un
alimentador de hojas automático o un adaptador para diapositivas y
transparencias.
{kind=link}
A los datos que obtienen los escáneres (normalmente imágenes RGB) se les aplica cierto algoritmo y se envían a la computadora mediante una interfaz de entrada/salida (normalmente SCSI, USB o LPT en máquinas anteriores al estándar USB).
No hay comentarios:
Publicar un comentario