Los datos son enviados desde la computadora por medio del puerto de video hacia los circuitos del monitor.
Los circuitos internos los reciben y de acuerdo a lo especificado por la computadora controla los cañones de electrones.
Estos cañones lanzan haces electrones hacia la pantalla, la cuál tiene zonas sensibles fosforescentes (píxeles) y al recibirlos emiten un pequeño pulso de luz.
Para pantallas monocromáticas integra solo un cañón, para el monitor a color integra tres cañones y cada uno controla un color (rojo, verde y azul), sistema RGB, los cuáles mezclados determinan el color del píxel en pantalla.
La trayectoria de los electrones en sentido vertical y horizontal hacia los píxeles de la pantalla, es controlada por medio bobinas que emiten de campos magnéticos.
Como el tiempo que permanece encendido el píxel es muy corto, el proceso se repite varias veces por segundo en toda la pantalla de manera horizontal y hacia abajo (entre 56 y 120 veces); a este proceso se le denomina frecuencia y se mide en Hz o ciclos sobre segundo.
Lo anterior se repite aunque para el usuario la pantalla esté estática, esta se esta refrescando varias veces por segundo.
La tecnología CRT para los primeros televisores blanco y negro fue desarrollada desde 1923, mientras que la televisión a color la desarrolla y patenta el mexicano Ing. Jorge González Camarena en 1940.
Los monitores CRT utilizados en las computadoras, inicialmente utilizaban imágenes en blanco y negro, posteriormente se introducen los monitores a color. Las siglas CRT significan ("Catodic Ray Tube") ó tubo de rayos catódicos. El monitor CRT es un dispositivo que permite la visualización de imágenes procedentes de la computadora, por medio del puerto de video hasta los circuitos del monitor.
Una vez procesada la información procedente de la computadora, los gráficos son creados por medio de un cañón que lanza electrones contra una pared de fósforo dónde chocan generando una pequeña luz de color.
NVidia Corporation (NASDAQ: NVDA) es una empresa
multinacional especializada en el desarrollo de unidades de procesamiento
gráfico y tecnologías de circuitos integrados para estaciones de trabajo,
ordenadores personales y dispositivos móviles.
GeForce 6800 Ultra & GeForce 7950 GX2.
Con sede en Santa Clara,
California, la compañía se ha convertido en uno de los principales proveedores
de circuitos integrados (CI), como unidades de procesamiento gráfico GPU y
conjuntos de chips usados en tarjetas de gráficos en videoconsolas y placas base
de computadora personal.
NVIDIA produce GPUs incluyendo la serie GeForce para
videojuegos, la serie NVIDIA Quadro de diseño asistido por ordenador y la
creación de contenido digital en las estaciones de trabajo, y la serie de
circuitos integrados nForce para placas base.
Chips gráficos
NV1
RIVA 128, RIVA 128ZX
VANTA LT, RIVA TNT, RIVA TNT 2
A partir de la serie GeForce, los chipsets se ocupan
prácticamente de todo el proceso gráfico, constituyendo lo que NVIDIA nombró
GPU (Graphic Processing Unit - Unidad de proceso gráfico).
GeForce Series
GeForce 256
GeForce 2: MX 200, MX 400, GTS, Pro, Ti y Ultra.
GeForce 3: Ti 200 y Ti 500.
GeForce 4: MX 420, MX 440, MX 460, Ti 4200, Ti 4400,
Ti 4600 y Ti 4800.
GeForce FX (5): (DirectX 8.0, 8.1 o últimamente 9.0b
por hardware) compuesta por los modelos FX 5950 Ultra, FX 5900, FX 5800, FX
5700, FX 5600, FX 5500, FX 5300 y FX 5200.
GeForce 6: (DirectX 9.0c por hardware) compuesta por
los modelos 6800 Ultra, 6800 GT, 6800, 6600 GT, 6600, 6500, 6200, 6150 y 6100
(AGP).
GeForce 8: (DirectX 10.0 por hardware) compuesta por
los modelos 8800 Ultra, 8800 GTX, 8800 GTS, 8800 GT, 8800 GS, 8600 GTS, 8600
GT, 8500 GT y 8400 GS.
GeForce 9: (DirectX 10.0 por hardware) compuesta por
los modelos 9800 GX2, 9800 GTX+, 9800 GTX, 9800 GT, 9600 GT, 9600 GSO, 9500 GT
y 9400 GT.
GeForce 200: (DirectX 10 y 10.1 por hardware)
compuesta por los modelos GT 220, GT 240, GTS 240, GTS 250, GTX 260, GTX 275,
GTX 280, GTX 285 y GTX 295.
GeForce 300: (DirectX 10.1 por hardware y DirectX 11
por Software) Es la serie GT 200 pero mejorada, menor consumo, menos tamaño de
fabricación (Menos de los 55 nanómetros de las GT 200).
GeForce 400: (DirectX 11.0 por hardware)
Arquitectura de nombre en clave "Fermi", compuesta temporalmente por
los modelos GTS 430, GTS 450, GTX 460, GTX 465, GTX 470 y GTX 480.
NVIDIA GoForce - serie de procesadores gráficos
creados especialmente para dispositivos móviles (PDAs, Smartphones y teléfonos
móviles).
Incluyen la tecnología nPower para un uso eficiente de energía.
GoForce 2150 – Soporta teléfonos móviles con cámara
de hasta 1,3 megapíxeles, aceleración gráfica en 2D.
GoForce 3000 – Versión de bajo coste de la GoForce
4000 con algunas características recortadas.
GoForce 4000 – Soporte de cámara de hasta 3,0
megapíxeles con grabación y reproducción de vídeos en MPEG-4/H.263.
GoForce 4500 – Aceleración de vídeo en 2D y 3D con
pixel shaders programable y geometría
GoForce 4800 – Soporte de cámara hasta 3,0
megapíxeles con aceleración de vídeo en 2D y 3D con píxel shader programable.
GoForce 6100 – Soporte de cámara hasta 10
megapíxeles, aceleración en 2D y 3D, y codec H.264.
NVIDIA Tegra – Es un sistema en un chip chip para
dispositivos móviles como smartphones, tablets, asistentes digitales
personales, dispositivos móviles y de Internet.
Tegra integra la arquitectura
de procesadores ARM, GPU, northbridge, southbridge, y controlador de memoria en
un solo paquete. La serie enfatiza el consumo de baja potencia y alto
rendimiento para la reproducción de audio y video
ATI
ATI Technologies Inc. fue una de las mayores
empresas de hardware que diseñaba GPU y tarjetas gráficas, fue comprada por AMD
en el año 2006 pero mantuvo su nombre para algunos productos hasta la salida de
la serie Radeon HD 6000 en el 2010.
Su mercado acaparó todo tipo de productos
para el procesamiento gráfico y multimedia, tanto para computadoras personales,
como dispositivos portátiles, videoconsolas, teléfonos móviles y
televisión digital. Su fundación data del 20 de agosto de 1985 (ATI). A la
empresa se le ha conocido por varios nombres.
Se fundó llamándose Array
Technology Inc., pero durante los primeros 5 meses se le cambió a Array
Technologies Inc., el 18 de diciembre de 1985 pasó a llamarse ATI Technologies
Inc., y definitivamente pasó a ser parte de AMD el 25 de octubre de 2006.
AMD tiene su sede en Markham, Ontario, en Canadá. Su
plantilla laboral, de acuerdo con su sitio web corporativo, es de 3.300
empleados directos en el continente americano, Europa y Asia. Aunque la
manufactura de los productos de AMD se realiza principalmente en Canadá y
Taiwán.
Productos
Además del desarrollo de GPUs de Gama Alta
(originalmente llamada por ATI como VPU, unidad de procesamiento visual) para
PC, ATI también diseña versiones integradas en portátiles (Mobility Radeon),
PDA y teléfonos móviles (Imageon), placas base integradas (Radeon IGP), en
Televisión Digital las STB (Set-top boxes, Xilleon) y otros.
ATI promueve algunos de sus productos con el
personaje ficticio femenino "Ruby", una "mercenaria por
contrato." Los videos de Animación por computadora donde Ruby aparece
en misiones son producidos por RhinoFX (siendo francotirador, saboteador, hacker,
etc) los cuales son mostrados en grandes eventos de tecnología como CeBIT y
CES.
Chipsets gráficos para computadoras
Soluciones Gráficas - Serie de 8-bits con tarjetas
ISA MDA, Hércules y compatibilidad CGA . Las versiones posteriores añadieron
soporte EGA.
EGA / VGA Wonder - adaptadores de pantalla IBM
"compatible con EGA/VGA" (1987)
Serie Mach - ATI presentó el primer "Acelerador
de Windows" GUI 2D . Con la evolución de la serie, la aceleración GUI
mejoró espectacularmente y apareció prontamente la aceleración de video.
Serie Rage - Primeros chips de ATI en aceleración 2D
y 3D. La serie evolucionó de una rudimentaria aceleración 3D con 2D GUI y
capacidad MPEG-1, a un altamente competitivo acelerador Direct3D 6 con el
entonces "mejor en su clase" en aceleración DVD (MPEG2). Los
distintos chips fueron muy populares entre los fabricantes de equipos
originales (OEMs) de la época. La Rage II se utilizó en la primera tarjeta de
vídeo multifuncional la ATI All-In-Wonder, y en las más avanzadas series
All-In-Wonder basadas en GPUs Rage que le seguieron. (1995-2004)
Rage Mobility - Diseñado para su uso en entornos de
baja potencia, como las notebooks. Estos chips son funcionalmente similares a
sus contrapartes de escritorio, pero con adiciones como la avanzada gestión de
la energía, interfaz LCD, y funcionalidad con dos monitores .
Radeon Serie - Lanzado en 2000, la línea Radeon de
ATI es la marca para el público en general de tarjetas aceleradoras de 3D . El
original Radeon DDR de ATI fue la primera aceleradora 3D en DirectX 7, fue su
primer motor gráfico que soportaba Hardware T&L.
ATI a menudo produjo
versiones «Pro» con mayores velocidades de reloj y, a veces, una versión
extrema "XT", e incluso más recientemente 'XT Platinum Edition PE)
"y versiones " XTX ". La serie Radeon fue la base para muchas
placas ATI All-In-Wonder.
Mobility Radeon - Una serie de versiones con poder
optimizado de chips gráficos Radeon para su uso en ordenadores portátiles.
Introdujeron innovaciones tales como los chips de módulos RAM, aceleración DVD
(MPEG2), sockets para GPU en notebooks, y "PowerPlay" tecnología de
gestión de energía.
ATI CrossFire - Esta tecnología es la respuesta de
ATI a la la plataforma SLI de NVIDIA . Que permite, mediante el uso de una
tarjeta de vídeo secundaria y una placa madre con doble PCI-E basada en un
chipset compatible con Crossfire de ATI, la capacidad de combinar el poder de
las dos tarjetas de video para aumentar el rendimiento a través de una variedad
de diferentes opciones de renderizado.
Hay una opción adicional para tarjetas
de vídeo PCI-E de conectar en la tercer ranura PCI-E una tarjeta para juegos de
física al azar, u otra opción de hacer azar de la física en la segunda tarjeta
de vídeo
FireGL - Lanzado en 2001, tras la adquisición por
ATI de FireGL Graphics de Diamond Multimedia. Lanzó tarjeta de vídeos para
Workstations CAD / CAM, basadas en la serie Radeon.
FireMV - Para workstations, con multi-vision, una
tecnología necesaria para mostra pantallas múltiples en estaciones de trabajo
con sólo aceleración 2D, generalmente sobre la base de la gama baja de
productos de la serie Radeon.
Controladores
Existen actualizaciones de los controladores en la
página de ATI para varios sistemas operativos y kernels, en los que destacan:
Windows 2000,
XP, Vista y Windows 7
Mac OS X y Apple
Boot Camp
Linux, con soporte oficial de Red Hat Enterprise,
SuSE y Ubuntu
Legacy (Windows 98, ME y controladores de hardware
obsoleto tanto para Windows como para Linux)
En ellos existen a su vez derivados para sistemas de
64 bits y 32 bits.
First in, first out o FIFO (en español "primero
en entrar, primero en salir"), es un concepto utilizado en estructuras de
datos, contabilidad de costes y teoría de colas. Guarda analogía con las
personas que esperan en una cola y van siendo atendidas en el orden en que llegaron,
es decir, que la primera persona que entra es la primera persona que sale.
También se lo llama first come first served o FCFS
(en español "primero en llegar, primero en ser atendido").
FIFO se utiliza en estructuras de datos para
implementar colas. La implementación puede efectuarse con ayuda de arrays o
vectores, o bien mediante el uso de punteros y asignación dinámica de memoria.
Si se implementa mediante vectores el número máximo
de elementos que puede almacenar está limitado al que se haya establecido en el
código del programa antes de la compilación (cola estática) o durante su
ejecución (cola pseudoestática ó dinámica).
Sea cual sea la opción elegida, el
número de elementos que podrá almacenar la cola quedará determinado durante
toda la ejecución del programa. Así, el sistema debe reservar el tamaño de
memoria necesario para acoger todos los datos, sea cual sea el número de
elementos usados.
En algunas aplicaciones, esto supone un problema ya
que puede desconocerse el número de elementos a contener en la cola. La
sencilla solución de reservar más memoria de la que se supone que se
necesitará, puede conducir a un despilfarro de la memoria (la cola puede esté
llena, aprovechando toda la memoria reservada; o bien, nunca terminar de
llenarse, ocupando recursos innecesarios en memoria).
Sin embargo, si se usa
asignación dinámica de memoria, el número máximo no está declarado en tiempo de
compilación sino en tiempo de ejecución, es decir, se reserva memoria a medida
que se necesite expandir el tamaño de la cola (adaptándose al tamaño necesario
en cada momento en función de los elementos que hay en la cola), haciendo un
mejor uso de la memoria disponible.
Uno de los usos de las colas es la exploración
"en anchura" de un árbol binario de búsqueda. Otro uso típico de las
colas, es la gestión de descargas de una aplicación P2P.
LIFO
El término LIFO es el acrónimo inglés de Last In
First Out (último en entrar, primero en salir). Puede tener distintos
significados según el contexto:
El término LIFO se utiliza en estructuras de datos y
teoría de colas. Guarda analogía con una pila de platos, en la que los platos
van poniéndose uno sobre el otro, y si se quiere sacar uno, se saca primero el
último que se puso.
En ciencias de la computación y de teoría de colas se
refiere a los elementos almacenados en la forma en que algunos tipos de
estructuras de datos se procesan. Por definición, en una lista LIFO lineal
estructurado, los elementos pueden ser añadidos o despegado de un solo extremo,
llamado el "superior". Una estructura LIFO puede ilustrarse con
el ejemplo de una pila de bandejas. La última bandeja que se coloca en la parte
superior es también el primero en ser retirado de la parte superior.
El término en la computación se refiere generalmente
a los principios abstractos de procesamiento lista y almacenamiento temporal,
particularmente cuando hay una necesidad de acceder a los datos en cantidades
limitadas, y en un cierto orden. LIFO es el más utilizado en los casos en que
los últimos datos añadidos a la estructura debe ser de los primeros datos que
deben ser removidos o evaluado.
Una analogía útil es el empleado de oficina:
una persona sólo puede manejar una página a la vez, por lo que la pieza
superior del papel añadido a un montón es el primero fuera, en paralelo a las
limitaciones como el ancho de bus de datos y el hecho de que sólo se puede
manipular un único binario de dirección de datos en un ordenador al mismo
tiempo.
El resumen mecanismo de LIFO, cuando se aplica a la informática,
inevitablemente recaen en las estructuras de datos reales implementados como
las pilas del mismo nombre, cuya relación con la "pila de papel",
"pila de placas "Debería ser obvio. Otros nombres para el dispositivo
se "Empuje hacia abajo la lista" y "pilas"
El término
FILO ("primero en entrar, último en salir") se puede utilizar como
sinónimos, ya que el término hace hincapié en que las adiciones a la lista de
los primeros es necesario esperar hasta que la altura de la estructura LIFO
"de arriba" para acceder.
Los LCFS plazo ("en último lugar,
primero servido") se utiliza a veces en la teoría de las colas. La
diferencia entre una lista general, una matriz, cola, o una pila, se define por
las normas aplicadas y se utiliza para acceder al mecanismo. En cualquier
caso, una estructura LIFO se accede en orden inverso a la cola : "Hay
ciertas situaciones frecuentes en la informática cuando se quiere restringir
las inserciones y deleciones de modo que sólo puede tener lugar al principio o
al final de la lista, no en el centro. Dos de las estructuras de datos útiles
en este tipo de situaciones son pilas y colas
Un altavoz es un traductor de la señal eléctrica en señal acústica. Lo hace atraves de la membrana mediante un movimiento acorde al sonido a reproducir y a la corriente que le suministran.
Al mover la membrana que esta en contacto con el aire, esta produce cambios de presión en el aire que esta en contacto con la membrana produciendo el sonido, este se propaga atraves del aire hasta que llega a nuestros oídos. Los altavoces que predominan en el mercado son de tipo electromagnético, se basan en enfrentar un campo magnético variable creado por una bobina con el de un imán permanente. Estos campos enfrentados hacen moverse la membrana que es la que transmite el sonido.
Altavoz de cono:
La araña se encarga de mantener centrado el cono, junto a la suspensión. El imán, junto a las piezas polares crean un circuito magnético. En el entrehierro es donde el campo de la bobina reacciona contra el campo fijo del imán.
Altavoz de cúpula:
El altavoz de cúpula funciona básicamente igual que el de cono, pero en éste la superficie radiante no es un cono, es una cúpula. La cúpula tiene la característica de que la resonancia en esa estructura es absorbida de manera muy eficiente y prácticamente no causa efectos audibles, pero tiene como desventaja que la aceleración no es igual en todos los puntos de la cúpula, siendo el centro el más perjudicado. Como consecuencia, se produce una pérdida de eficiencia respecto a su equivalente en forma de cono, pero con un sonido mejor al evitar la resonancia.
Audífonos:
Los audífonos reciben el sonido a través de un micrófono, que luego convierte las ondas sonoras en señales eléctricas. El amplificador aumenta el volumen de las señales y luego envía el sonido al oído a través de un altavoz.
los cables están conectados de tal manera que creen un corriente en la espira introducida en la otra pieza. Así que dependiendo del señal, la intensidad circulará en un sentido u otro, lo que hará que la espira se convierta en un electroimán, y dependiendo de la polarización de éste en cada momento, ambos imanes, el permanente y el creado a partir de la circulación de corriente, se atraerán o se repelerán continuamente. Ésto hará que la membrana de plástico vibre de una manera u de otra, generando así el sonido
Al desplazarlo sobre una superficie plana, la bola
o sensor mueve los rodillos que están en contacto con ella. Un rodillo se
encarga de los movimientos laterales y otro de los verticales. Los rodillos
están conectados a unas ruedas, llamadas codificadores, que están situadas
enfrente de unos pequeños emisores de luz.
Tienen una gran esfera de plástico o goma, de varias
capas, en su parte inferior para mover dos ruedas que generan pulsos en
respuesta al movimiento de éste sobre la superficie.
Una variante es el modelo
de Honeywell que utiliza dos ruedas inclinadas 90 grados entre ellas en vez de
una esfera.
La circuitería interna cuenta los pulsos generados
por la rueda y envía la información a la computadora, que mediante software
procesa e interpreta.
Estas ruedas poseen unas ranuras que
permiten el paso de la luz hasta unos dispositivos fotosensibles, que detectan
los destellos y los traducen en información codificada que el ordenador es
capaz de interpretar. Por otra parte, al pulsar algún botón del ratón, se
genera otro tipo de señal, que el ordenador distinguirá de la anterior y que
dependiendo del programa que se esté utilizando, permitirá realizar distintas
operaciones.
Teclado
Este consta de una matriz de contactos, que al presionar una
tecla, cierran el circuito. Un micro controlador detecta la presión
de la tecla, y genera un código. Al soltarse la tecla, se genera otro código.
De esta manera el chip localizado en la placa del teclado puede saber cuándo
fue presionada y cuándo fue soltada, y actuar en consecuencia. Los códigos
generados son llamados Códigos de barrido (Scan code, en inglés).
Una vez detectada la presión
de la tecla, los códigos de barrido son generados, y enviados de forma serial a
través del cable y con el conector del teclado, llegan a la placa madre de la
PC. Allí, el código es recibido por el microcontrolador conocido como BIOS DE
TECLADO. Este chip compara el código de barrido con el correspondiente a la
Tabla de caracteres. Genera una interrupción por hardware, y envía los datos al
procesador.
En los teclados AT los
códigos generados son diferentes, por lo que por razones de compatibilidad es
necesario traducirlos. De esta función se encarga el controlador de teclado que
es otro microcontrolador (normalmente el 8042), éste ya situado en el PC. Este controlador
recibe el Código de Búsqueda del Teclado (Kscan Code) y genera el propiamente dicho Código de
Búsqueda. La comunicación del teclado es vía serie. El protocolo de
comunicación es bidireccional, por lo que el servidor puede enviarle comandos
al teclado para configurarlo, reiniciarlo, diagnósticos, etc.
Microfono
El micrófono es un transductor electroacústico. Su
función es la de traducir las vibraciones debidas a la presión acústica
ejercida sobre su cápsula por las ondas sonoras en energía eléctrica, lo que
permite por ejemplo grabar sonidos de cualquier lugar o elemento.
Es capaz de captar ondas sonoras convirtiendo la
potencia acústica en eléctrica de similares características ondulatorias. Para
ello se necesita la combinación escalonada de dos tipos de transductores.
El
primero de ellos consiste en una fina lámina, denominada diafragma. Su misión
es transformar las variaciones de presión en vibraciones mecánicas, es por
tanto un transductor mecano acústico. El
segundo transforma las vibraciones mecánicas recibidas en magnitudes
eléctricas, es por tanto un transductor electromecánico. El conjunto de los dos
transductores puede considerarse como uno electroacústico.
Cámara de vídeo
Podemos explicar su funcionamiento por pasos.
Primero, la luz que proviene de la óptica es descompuesta al pasar por un
prisma de espejos dicróicos que descomponen la luz en las tres componentes
básicas que se utilizan en televisión: el rojo (R o red), el verde (G o green)
y el azul (B o blue).
Justo en la otra cara de cada lado del prisma están los
captadores, actualmente dispositivos CCDs y anteriormente tubos de cámara. El
sistema óptico está ajustado para que en el target de cada captador se
reconstruya la imagen nítidamente.
Esta imagen es leída por los CCDs y su
sistema de muestreo y conducida a los circuitos preamplificadores.
Los circuitos de muestreo y lectura de los CCD deben
estar sincronizados con la señal de referencia de la estación.
Para ello, todos
los generadores de pulsos se enclavan con las señales procedentes del sistema
de sincronismo de la cámara, que recibe la señal de genlock, normalmente negro
de color, desde el sistema en el que se está trabajando. O bien, se trabaja sin
referencia exterior, como suele hacerse al utilizar cámaras de ENG.
Ésta imagen leída por los CCD y su sistema de
muestreo es conducida luego a los circuitos preamplificadores. En los
preamplificadores se genera e inserta, cuando así se quiere, la señal de prueba
llamada pulso de calibración, comúnmente llamada cal, la cual recorrerá toda la
electrónica de la cámara y servirá para realizar un rápido diagnóstico y ajuste
de la misma.
De los preamplificadores las señales se enrrutan a los
procesadores, donde se realizaran las correcciones de gamma, detalle, masking,
pedestal, flare, ganancias, clipeos y limitadores.
Las señales ya están listas para salir al sistema de
producción o para ser grabadas. Se envían entonces a los circuitos de
visionado, los cuales muestran la imagen en el visor de la cámara y la
transmiten mediante los correspondientes conectores de salida.
La salida básica, video compuesto VBS, sigue siendo
la del sistema analógico de TV elegido: PAL, NTSC o SECAM, por lo que el
codificador está presente en todas las cámaras. Añadido al mismo estará el
codificador de la señal a digital IEEE1394, FireWire o la SDI o HDSDI.
Estas
señales son mandadas mediante el adaptador triax, fibra óptica o multicore
(26pins) a la estación base, que se encargará de enrutarlas en el sistema de
producción al que pertenece la cámara. Si la cámara está unida a un
magnetoscopio es un camcorder o camascopio y, entonces, las señales se
suministrán a los circuitos indicados para su grabación en cinta, en disco
óptico, disco duro o tarjetas de memoria.
Todas las funciones de la cámara están controladas
con un procesador, el cual se comunica con los paneles de control, tanto de
ingeniería (MSP) como de explotación (OCP), y es el encargado de realizar los
ajustes automáticos y/o manuales pertinentes.
Los sistemas auxiliares de comunicación intercom y
los sistemas de control de la óptica y de luz de aviso Tally residen en
circuitos electrónicos de la placa auxiliar. Todo ello es alimentado por la
fuente de alimentación que se encarga de generar las diferentes tensiones de
alimentación necesarias para los equipos electrónicos y ópticos. Estas
tensiones suelen partir de una única tensión de alimentación 12 Volt CC
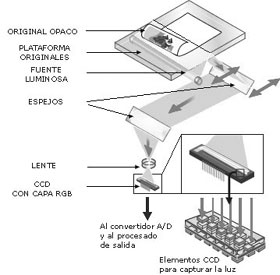
Escaner Plano
Un escáner de computadora se utiliza para convertir,
mediante el uso de la luz, imágenes impresas o documentos a formato digital.
Los escáneres pueden tener accesorios como un
alimentador de hojas automático o un adaptador para diapositivas y
transparencias.
Al obtenerse una imagen digital se puede corregir
defectos, recortar un área específica de la imagen o también digitalizar texto
mediante técnicas de OCR. Estas funciones las puede llevar a cabo el mismo dispositivo
o aplicaciones especiales
A los datos que obtienen los escáneres (normalmente
imágenes RGB) se les aplica cierto algoritmo y se envían a la computadora
mediante una interfaz de entrada/salida (normalmente SCSI, USB o LPT en
máquinas anteriores al estándar USB).
La profundidad del color depende de las
características del vector de escaneado (la primera de las características
básicas que definen la calidad del escáner) que lo normal es que sea de al
menos 24 bits. Con 48 bits se obtiene una mejor calidad o profundidad del color.



 Los monitores CRT utilizados en las computadoras, inicialmente utilizaban imágenes en blanco y negro, posteriormente se introducen los monitores a color. Las siglas CRT significan ("Catodic Ray Tube") ó tubo de rayos catódicos. El monitor CRT es un dispositivo que permite la visualización de imágenes procedentes de la computadora, por medio del puerto de video hasta los circuitos del monitor.
Los monitores CRT utilizados en las computadoras, inicialmente utilizaban imágenes en blanco y negro, posteriormente se introducen los monitores a color. Las siglas CRT significan ("Catodic Ray Tube") ó tubo de rayos catódicos. El monitor CRT es un dispositivo que permite la visualización de imágenes procedentes de la computadora, por medio del puerto de video hasta los circuitos del monitor.  Los monitores CRT utilizados en las computadoras, inicialmente utilizaban imágenes en blanco y negro, posteriormente se introducen los monitores a color. Las siglas CRT significan ("Catodic Ray Tube") ó tubo de rayos catódicos. El monitor CRT es un dispositivo que permite la visualización de imágenes procedentes de la computadora, por medio del puerto de video hasta los circuitos del monitor.
Los monitores CRT utilizados en las computadoras, inicialmente utilizaban imágenes en blanco y negro, posteriormente se introducen los monitores a color. Las siglas CRT significan ("Catodic Ray Tube") ó tubo de rayos catódicos. El monitor CRT es un dispositivo que permite la visualización de imágenes procedentes de la computadora, por medio del puerto de video hasta los circuitos del monitor. 















{kind=link}